Toggle Nav




Arduino Robot
SKU
Arduino ROBOT
Brand
Reward Points
0
₹15,009.00
Out of Stock
Topic:
Topic
Product Description
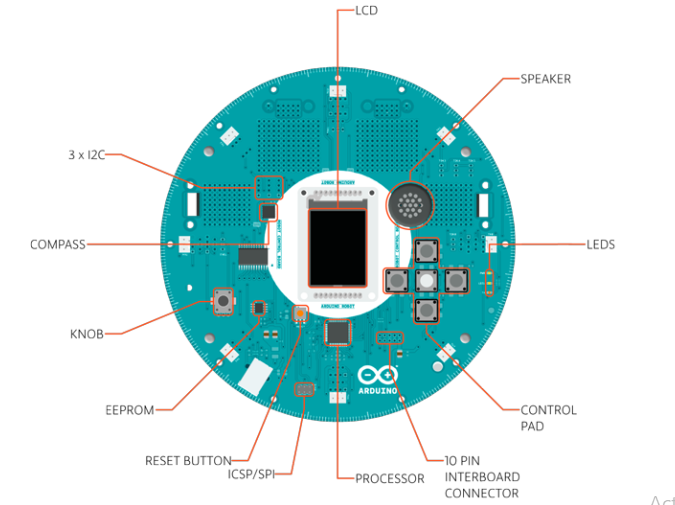
The Arduino Robot is the first official Arduino on wheels. The robot has two processors, one on each of its two boards. The Motor Board controls the motors, and the Control Board reads sensors and decides how to operate. Each of the boards is a full Arduino board programmable using the Arduino IDE.
Both Motor and Control boards are microcontroller boards based on the ATmega32u4 (datasheet). The Robot has many of its pins mapped to on-board sensors and actuators. Programming the robot is similar to the process with the Arduino Leonardo. Both processors have built-in USB communication, eliminating the need for a secondary processor. This allows the Robot to appear to a connected computer as a virtual (CDC) serial / COM port. As always with Arduino, every element of the platform – hardware, software and documentation – is freely available and open-source. This means you can learn exactly how it's made and use its design as the starting point for your own robots. The Arduino Robot is the result of the collective effort from an international team looking at how science can be made fun to learn. Arduino is now on wheels, come ride with us!
Technical Specifications
| Model | ROBOT |
|---|---|
| Microcontroller | ATmega32u4 |
| Operating Voltage | 5V |
| Input Voltage | 5V through flat cable |
| Digital I/O Pins | 5 |
| PWM Channels | 6 |
| Analog Input Channels | 4 (of the Digital I/O pins) |
| Analog Input Channels (multiplexed) | 8 |
| DC Current per I/O Pin | 40 mA |
| Flash Memory | 32 KB (ATmega32u4) of which 4 KB used by bootloader |
| SRAM | 2.5 KB (ATmega32u4) |
| EEPROM (internal) | 1 KB (ATmega32u4) |
| EEPROM (external) | 512 Kbit (I2C) |
| Clock Speed | 16 MHz |
| Keypad | 5 keys |
| Knob | potentiomenter attached to analog pin |
| Full color LCD | over SPI communication |
| SD card reader | for FAT16 formatted cards |
| Speaker | 8 Ohm |
| Digital Compass | provides deviation from the geographical north in degrees |
| I2C soldering ports | 3 |
| Prototyping areas | 4 |
| Radius | 185 mm |
| Heigth | 85 mm |
Write Your Own Review
- 1pcs Arduino Robot Board